Bestämma avstånd
Avstånd från punkt till punkt och från punkt till linje
Avstånd från punkt till punkt bestäms av längden på den raka linjen som förbinder dessa punkter. Som visas ovan kan detta problem lösas antingen med den rätta triangelmetoden eller genom att ersätta projektionsplan, flytta segmentet till nivålinjens position.
Avstånd från punkt till linje mätt med ett vinkelrät segment som dras från en punkt till en linje. Segmentet av denna vinkelrät är avbildat i naturlig storlek på projektionsplanet om det dras till den utskjutande linjen. Således måste först den räta linjen överföras till den utskjutande positionen, och sedan måste en vinkelrät från en given punkt sänkas ner på den. I fig. 1 visar lösningen på detta problem. För direkt översättning allmän ståndpunkt AB placeras i rak nivå x14 IIA1 B1. Sedan överförs AB till den projicerande positionen genom att införa ett ytterligare projektionsplan P5, för vilket en ny projektionsaxel x45\A4 B4 ritas.
Bild 1
I likhet med punkterna A och B projiceras punkt M på projektionsplanet P5.
Projektion K5 av basen K av vinkelrät sänkt från punkt M till linje AB på projektionsplanet P5 kommer att sammanfalla med motsvarande projektioner av punkterna

A och B. Projektion M5 K5 av den vinkelräta MK är naturvärdet för avståndet från punkt M till rät linje AB.
I systemet med projektionsplan P4/P5 kommer vinkelrät mot MK att vara en nivålinje, eftersom den ligger i ett plan parallellt med projektionsplanet P5. Därför är dess projektion M4 K4 på planet P4 parallell med x45, dvs. vinkelrätt mot projektion A4 B4. Dessa förhållanden bestämmer läget för projektionen K4 av basen av den vinkelräta K, som hittas genom att dra en rät linje från M4 parallellt med x45 tills den skär projektionen A4 B4. De återstående projektionerna av perpendikeln hittas genom att projicera punkt K på projektionsplanen P1 och P2.
Avstånd från punkt till plan
Lösningen på detta problem visas i fig. 2. Avståndet från punkt M till planet (ABC) mäts av ett vinkelrät segment som faller från punkten till planet.
Figur 2
Eftersom vinkelrät mot det projicerande planet är en nivålinje, överför vi det givna planet till denna position, som ett resultat av vilket vi på det nya introducerade projektionsplanet P4 erhåller en degenererad projektion C4 B4 av ABC-planet. Därefter projicerar vi punkt M på P4. Naturvärdet för avståndet från punkt M till planet bestäms av det vinkelräta segmentet

[MK]=[M4 K4]. De återstående projektionerna av perpendikeln är konstruerade på samma sätt som i föregående problem, d.v.s. med hänsyn till det faktum att MK-segmentet i systemet med projektionsplan P1 / P4 är en nivålinje och dess projektion M1 K1 är parallell med axeln
x14.
Avstånd mellan två linjer
Det kortaste avståndet mellan korsande räta linjer mäts av storleken på segmentet av den gemensamma vinkelrät mot dem avskuren av dessa räta linjer. Problemet löses genom att välja (som ett resultat av två på varandra följande substitutioner) ett projektionsplan vinkelrätt mot en av de skärande linjerna. I detta fall kommer det erforderliga vinkelräta segmentet att vara parallellt med det valda projektionsplanet och kommer att avbildas på det utan förvrängning. I fig. Figur 3 visar två skärande linjer definierade av segmenten AB och CD.
Figur 3
Linjerna projiceras initialt på projektionsplanet P4, parallellt med en (något) av dem, till exempel AB, och vinkelrätt mot P1.
På projektionsplanet P4 kommer segment AB att avbildas utan distorsion. Sedan projiceras segmenten på ett nytt plan P5 vinkelrätt mot samma linje AB och plan P4. På projektionsplanet P5 degenererar projektionen av segmentet AB vinkelrätt mot det till punkten A5 = B5, och det önskade värdet N5 M5 för segmentet NM är vinkelrätt mot C5 D5 och avbildas i full storlek. Med hjälp av lämpliga kommunikationslinjer konstrueras projektioner av segmentet MN på originalet

ritning. Som visats tidigare är projektionen N4 M4 för det önskade segmentet på planet P4 parallell med projektionsaxeln x45, eftersom det är en nivålinje i systemet med projektionsplan P4/P5.
Uppgiften att bestämma avståndet D mellan två parallella linjer AB till CD - specialfall den föregående (fig. 4).
Figur 4
Genom att dubbelt ersätta projektionsplanen överförs de parallella räta linjerna till den projicerande positionen, som ett resultat av vilket vi på projektionsplanet P5 kommer att ha två degenererade projektioner A5 = B5 och C5 = D5 av de räta linjerna AB och CD. Avståndet mellan dem D kommer att vara lika med dess naturliga värde.
Avståndet från en rät linje till ett plan parallellt med den mäts med ett vinkelrät segment som dras från vilken punkt som helst på den räta linjen till planet. Därför är det tillräckligt att omvandla det allmänna positionsplanet till det projicerande planets position, ta en direkt punkt, och lösningen av problemet kommer att reduceras till att bestämma avståndet från punkten till planet.
För att bestämma avståndet mellan parallella plan är det nödvändigt att överföra dem till den utskjutande positionen och konstruera en vinkelrät mot de degenererade projektionerna av planen, vars segment mellan dem kommer att vara det önskade avståndsvärdet.
Dessa uppgifter inkluderar: uppgifter för att bestämma avstånden från en punkt till en rät linje, till ett plan, till en yta; mellan parallella och korsande linjer; mellan parallella plan osv.
Alla dessa uppgifter förenas av tre omständigheter:
För det första, eftersom det kortaste avståndet mellan sådana figurer är en vinkelrät, kommer de alla till konstruktionen av ömsesidigt vinkelräta räta linjer och plan.
för det andra, i vart och ett av dessa problem är det nödvändigt att bestämma segmentets naturliga längd, det vill säga att lösa det andra huvudmetriska problemet.
för det tredje, det är komplexa uppgifter, de löses i flera steg, och i varje steg löses ett separat, litet specifikt problem.
Låt oss överväga att lösa ett av dessa problem.
Uppgift: Bestäm avståndet från en punkt M till en rak linje i allmänt läge A(Figur 4-26).
Algoritm:
Steg 1: Avståndet från en punkt till en linje är en vinkelrät. Sedan rakt A- allmän position, för att konstruera en vinkelrät mot den är det nödvändigt att lösa ett problem som liknar det som ges på sidan M4-4 i denna modul, det vill säga först genom punkten M rita ett plan S, vinkelrät A. Vi definierar detta plan som vanligt, hÇ f, medan h 1^ en 1, a f 2^ en 2

Steg 2: För att konstruera en vinkelrät måste du hitta en andra punkt för den. Detta kommer att vara poängen TILL, tillhörande linjen A. För att hitta det måste du lösa ett positionsproblem, det vill säga hitta linjens skärningspunkt A med flygplan S. Vi löser 1GPZ med den tredje algoritmen (Fig. 4-28):
Vi introducerar ett plan - en mellanhand G, G^^ P 1, GÉ aÞ Г 1 = а 1;
- GÇ S = b, G^^ P 1Þ b 1 (1 1 2 1) = Г 1, bÌ SÞ b 2 (1 2 2 2)Ì S 2.
- b 2Ç a 2 = K 2Þ K 1.

Steg 3: Hitta den faktiska storleken MK rätvinklig metod

Den fullständiga lösningen på problemet visas i fig. 4-30.

Algoritmisk registrering av lösningen:
1. S^a,S = hÇ f = M, h 1^a 1, f 2^a 2.
2. Vi introducerar ett plan - en mellanhand G,
- G^^ P 1, GÉ aÞ Г 1 = a 1;
- GÇ S = b, G^^ P 1Þ b 1 (1 1 2 1) = Г 1, bÌ SÞ b 2 (1 2 2 2)Ì S2.
- b 2Ç a 2 = K 2Þ K 1 .
3. Hitta den faktiska storleken MK.
Slutsatser:
1. Lösningen av alla metriska problem handlar om att lösa det första metriska huvudproblemet - den inbördes vinkelrätheten mellan en rät linje och ett plan.
2. Vid bestämning av avstånden mellan geometriska former Den andra huvudmetriska uppgiften används alltid - för att bestämma den naturliga storleken på ett segment.
3. Ett plan som tangerar en yta i en punkt kan definieras av två skärande räta linjer, som var och en är tangent till en given yta.
Säkerhetsfrågor
1. Vilka problem kallas metriska?
2. Vilka två huvudproblem känner du till?
3. Varför är det mer fördelaktigt att ange ett plan vinkelrätt mot en allmän linje?
4. Vad heter planet vinkelrätt mot en av nivålinjerna?
5. Vad heter planet vinkelrätt mot en av de utskjutande linjerna?
6. Vad kallas ett plan som tangerar en yta?
155*. Bestäm den naturliga storleken för ett segment AB av en rät linje i allmänt läge (Fig. 153, a).
Lösning. Som bekant är projektionen av ett rakt linjesegment på vilket plan som helst lika med själva segmentet (med hänsyn till ritningens skala), om det är parallellt med detta plan
(Fig. 153, b). Det följer av detta att genom att transformera ritningen är det nödvändigt att uppnå parallellitet för detta segmentkvadrat. V eller kvadrat H eller komplettera systemet V, H med ett annat plan vinkelrätt mot kvadraten. V eller till pl. H och samtidigt parallellt med detta segment.
I fig. 153, c visar införandet av ett ytterligare plan S, vinkelrätt mot kvadraten. H och parallellt med ett givet segment AB.
Projektionen a s b s är lika med naturvärdet för segmentet AB.
I fig. 153, d visar en annan teknik: segment AB roteras runt en rät linje som går genom punkt B och vinkelrätt mot kvadraten. H, till en position parallell
pl. V. I det här fallet förblir punkt B på plats och punkt A tar en ny position A 1. Horisonten är i ett nytt läge. projektion a 1 b || x-axeln Projektionen a" 1 b" är lika med den naturliga storleken på segmentet AB.

156. Givet pyramiden SABCD (Fig. 154). Bestäm den faktiska storleken på kanterna på pyramiden AS och CS, med hjälp av metoden för att ändra projektionsplan, och kanterna BS och DS, med hjälp av rotationsmetoden, och ta rotationsaxeln vinkelrät mot kvadraten. H.
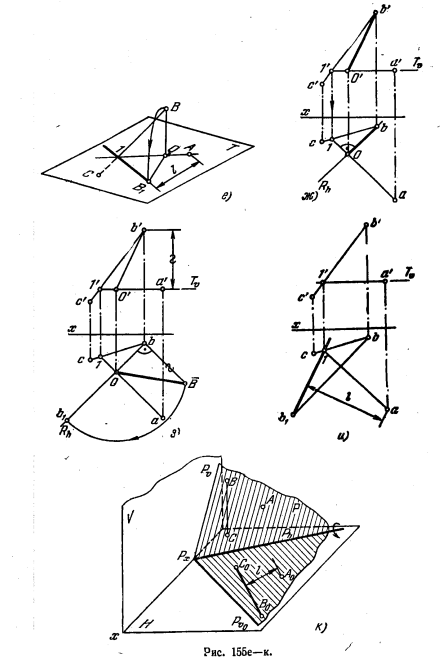
157*. Bestäm avståndet från punkt A till rät linje BC (bild 155, a).
Lösning. Avståndet från en punkt till en linje mäts med ett vinkelrät segment som dras från punkten till linjen.
Om den räta linjen är vinkelrät mot något plan (fig. 155.6), så mäts avståndet från punkten till den räta linjen som avståndet mellan projektionen av punkten och punktprojektionen av den räta linjen på detta plan. Om en rät linje upptar en allmän position i V, H-systemet, är det nödvändigt att införa ytterligare två plan i V, H-systemet för att bestämma avståndet från en punkt till en rät linje genom att ändra projektionsplan.
Först (fig. 155, c) går vi in på torget. S, parallellt med segmentet BC (den nya axeln S/H är parallell med projektionen bc), och konstruera projektionerna b s c s och a s. Sedan (fig. 155, d) introducerar vi en annan kvadrat. T, vinkelrät mot rät linje BC (ny axel T/S är vinkelrät mot b s med s). Vi konstruerar projektioner av en rät linje och en punkt - med t (b t) och ett t. Avståndet mellan punkterna a t och c t (b t) är lika med avståndet l från punkt A till rät linje BC.
I fig. 155, d, utförs samma uppgift med hjälp av rotationsmetoden i dess form, som kallas parallellrörelsemetoden. Först roteras den räta linjen BC och punkt A, med oförändrad relativ position, runt någon (ej angiven på ritningen) rät linje vinkelrät mot kvadraten. H, så att den räta linjen BC är parallell med kvadraten. V. Detta motsvarar att flytta punkterna A, B, C i plan parallella med kvadraten. H. Samtidigt horisonten. projektionen av ett givet system (BC + A) ändras varken i storlek eller konfiguration, bara dess position relativt x-axeln ändras. Vi placerar horisonten. projektion av den räta linjen BC parallell med x-axeln (position b 1 c 1) och bestäm projektionen a 1, avsätt c 1 1 1 = c-1 och a 1 1 1 = a-1, och a 1 1 1 ⊥ c 1 1 1. Genom att dra raka linjer b"b" 1 , a"a" 1 , c"c" 1 parallellt med x-axeln hittar vi fronten på dem. projektioner b" 1, a" 1, c" 1. Därefter flyttar vi punkterna B 1, C 1 och A 1 i plan parallella med area V (också utan att ändra dem relativ position), för att erhålla B 2 C 2 ⊥ pl. H. I detta fall kommer projektionen av den raka linjen att vara vinkelrät mot framsidan x, b axlar 2 c" 2 = b" 1 c" 1, och för att konstruera projektionen a" 2 måste du ta b" 2 2" 2 = b" 1 2" 1, rita 2"a" 2 ⊥ b" 2 c" 2 och ställ åt sidan a" 2 2" 2 = a" 1 2" 1 . Nu, efter att ha spenderat med 1 med 2 och en 1 a 2 || x 1 får vi projektioner b 2 från 2 och a 2 och det önskade avståndet l från punkt A till rät linje BC. Avståndet från A till BC kan bestämmas genom att vrida planet definierat av punkt A och rät linje BC runt horisontalplanet för detta plan till position T || pl. H (fig. 155, f).
I planet som definieras av punkt A och rät linje BC, rita en horisontell linje A-1 (Fig. 155, g) och rotera punkt B runt den. Punkt B flyttas till kvadrat. R (anges på ritningen bredvid R h), vinkelrät mot A-1; vid punkt O finns rotationscentrum för punkt B. Vi bestämmer nu naturvärdet för rotationsradien VO (Fig. 155, c). I erforderlig position, d.v.s. när pl. T, bestämt av punkt A och rät linje BC, blir || pl. H, punkt B kommer att vara på Rh på ett avstånd Ob 1 från punkt O (det kan finnas en annan position på samma spår Rh, men på andra sidan O). Punkt b 1 är horisonten. projektion av punkt B efter att ha flyttat den till position B 1 i rymden, när planet definierat av punkt A och rät linje BC har intagit position T.
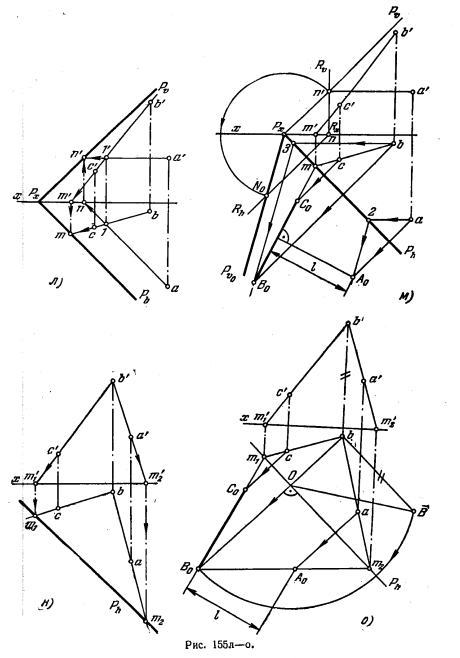
Genom att rita (fig. 155, i) den räta linjen b 1 1 erhåller vi horisonten. projektion av den räta linjen BC, redan belägen || pl. H är i samma plan som A. I detta läge är avståndet från a till b 1 1 lika med det önskade avståndet l. Planet P, i vilket de givna elementen ligger, kan kombineras med kvadraten. H (fig. 155, j), vändande kvadrat. R runt henne är horisonten. spåra. När vi går från att specificera planet med punkt A och rät linje BC till att specificera räta linjer BC och A-1 (Fig. 155, l), hittar vi spår av dessa räta linjer och ritar spår P ϑ och P h genom dem. Vi bygger (Fig. 155, m) kombinerat med torget. H-läge fram. spåra - P ϑ0.
Genom punkt a ritar vi horisonten. frontal projektion; den kombinerade fronten passerar genom punkt 2 på kurvan P h parallellt med P ϑ0. Punkt A 0 - kombinerat med kvadrat. H är positionen för punkt A. På samma sätt finner vi punkt B 0. Direkt sol i kombinerat med fyrkant. H-positionen passerar genom punkt B 0 och punkt m (horisontell spår av den räta linjen).
Avståndet från punkt A 0 till rät linje B 0 C 0 är lika med det erforderliga avståndet l.
Du kan utföra den angivna konstruktionen genom att bara hitta ett spår av P h (bild 155, n och o). Hela konstruktionen liknar en rotation kring en horisontal (se fig. 155, g, c, i): spåret P h är ett av horisontalerna pl. R.
Av metoderna för att transformera en ritning som ges för att lösa detta problem är den föredragna metoden rotation runt horisontellt eller frontalt.

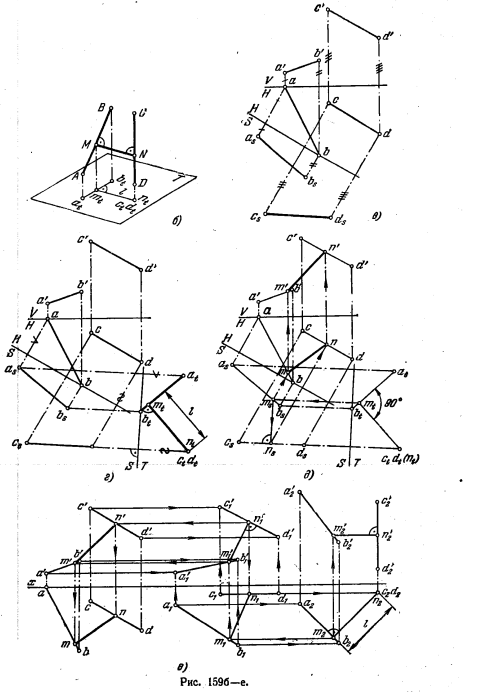
158. SABC-pyramiden ges (Fig. 156). Bestäm avstånd:
a) från toppen B av basen till dess sida AC genom metoden för parallell rörelse;
b) från toppen S av pyramiden till sidorna BC och AB av basen genom att rotera runt horisontalplanet;
c) från toppen S till sidan AC av basen genom att ändra projektionsplanen.

159. Ett prisma ges (fig. 157). Bestäm avstånd:
a) mellan ribborna AD och CF genom att byta projektionsplan;
b) mellan revbenen BE och CF genom rotation runt fronten;
c) mellan kanterna AD och BE genom parallell rörelse.
160. Bestäm den faktiska storleken på fyrhörningen ABCD (Fig. 158) genom att rikta in den mot kvadraten. N. Använd endast det horisontella spåret av planet.
161*. Bestäm avståndet mellan de korsande räta linjerna AB och CD (Fig. 159, a) och konstruera projektioner av en gemensam vinkelrät mot dem.
Lösning. Avståndet mellan korsande linjer mäts med ett segment (MN) vinkelrätt mot båda linjerna (Fig. 159, b). Uppenbarligen, om en av de raka linjerna placeras vinkelrätt mot vilken kvadrat som helst. T då


segmentet MN vinkelrätt mot båda linjerna kommer att vara parallellt med kvadraten. Dess projektion på detta plan kommer att visa det nödvändiga avståndet. Projektion av den räta vinkeln av menaden MN n AB på torget. T visar sig också vara en rät vinkel mellan m t n t och a t b t, eftersom en av sidorna av den räta vinkeln är AMN, nämligen MN. parallellt med kvadraten T.
I fig. 159, c och d, bestäms det erforderliga avståndet l genom metoden för att byta projektionsplan. Först introducerar vi ytterligare en kvadrat. projektioner S, vinkelrätt mot kvadraten. H och parallell med rät linje CD (Fig. 159, c). Sedan introducerar vi ytterligare en ruta. T, vinkelrätt mot kvadraten. S och vinkelrätt mot samma räta linje CD (Fig. 159, d). Nu kan du konstruera en projektion av den allmänna vinkelrät genom att dra m t n t från punkten c t (d t) vinkelrät mot projektionen a t b t. Punkterna m t och n t är projektioner av skärningspunkterna för denna vinkelrät med räta linjer AB och CD. Med hjälp av punkten m t (fig. 159, e) hittar vi m s på a s b s: projektionen av m s n s bör vara parallell med T/S-axeln. Därefter, från m s och n s, hittar vi m och n på ab och cd, och från dem m" och n" på a"b" och c"d".
I fig. 159, c visar lösningen på detta problem med metoden för parallella rörelser. Först placerar vi den räta linjen CD parallellt med kvadraten. V: projektion c 1 d 1 || X. Därefter flyttar vi räta linjer CD och AB från positionerna C 1 D 1 och A 1 B 1 till positionerna C 2 B 2 och A 2 B 2 så att C 2 D 2 är vinkelrät mot H: projektion c" 2 d" 2 ⊥ x. Segmentet av den erforderliga vinkelrät är beläget || pl. H, och därför uttrycker m 2 n 2 det önskade avståndet l mellan AB och CD. Vi hittar läget för utsprången m" 2 och n" 2 på a" 2 b" 2 och c" 2 d" 2, sedan utsprången m 1 och m" 1, n 1 och n" 1, slutligen projektioner m" och n", m och n.
162. SABC-pyramiden ges (Fig. 160). Bestäm avståndet mellan kanten SB och sidan AC på basen av pyramiden och konstruera projektioner av en gemensam vinkelrät mot SB och AC, med hjälp av metoden för att ändra projektionsplan.

163. SABC-pyramiden ges (Fig. 161). Bestäm avståndet mellan kanten SH och sidan BC på basen av pyramiden och konstruera projektioner av den gemensamma vinkelrät mot SX och BC med hjälp av parallellförskjutningsmetoden.
164*. Bestäm avståndet från punkt A till planet i de fall där planet specificeras av: a) triangel BCD (Fig. 162, a); b) spår (fig. 162, b).
Lösning. Som ni vet mäts avståndet från en punkt till ett plan med värdet på vinkelrät ritat från punkten till planet. Detta avstånd projiceras på vilket område som helst. projektioner i full storlek, om detta plan är vinkelrätt mot kvadraten. projektioner (fig. 162, c). Denna situation kan uppnås genom att transformera ritningen, till exempel genom att ändra området. projektioner. Låt oss introducera pl. S (fig. 16c, d), vinkelrätt mot kvadraten. triangel BCD. För att göra detta spenderar vi på torget. triangel horisontell B-1 och placera projektionsaxeln S vinkelrätt mot projektionen b-1 horisontell. Vi konstruerar projektioner av en punkt och ett plan - a s och ett segment c s d s. Avståndet från a s till c s d s är lika med det önskade avståndet l från punkten till planet.

Till Rio. 162, d används metoden för parallell rörelse. Vi flyttar hela systemet tills horisontalplanet B-1 blir vinkelrät mot planet V: projektionen b 1 1 1 ska vara vinkelrät mot x-axeln. I detta läge kommer triangelns plan att bli frontalt utskjutande, och avståndet l från punkt A till det blir pl. V utan distorsion.

I fig. 162, b definieras planet av spår. Vi introducerar (Fig. 162, e) ytterligare en kvadrat. S, vinkelrät mot kvadraten. P: S/H-axeln är vinkelrät mot P h. Resten framgår av ritningen. I fig. 162, g problemet löstes med en rörelse: pl. P går till position P 1, dvs den blir framskjutande. Spåra. P 1h är vinkelrät mot x-axeln. Vi bygger fronten i denna position av planet. det horisontella spåret är punkten n" 1,n 1. Spåret P 1ϑ kommer att passera genom P 1x och n 1. Avståndet från a" 1 till P 1ϑ är lika med det erforderliga avståndet l.
165. SABC-pyramiden ges (se fig. 160). Bestäm avståndet från punkt A till kanten av SBC-pyramiden med hjälp av parallellrörelsemetoden.
166. SABC-pyramiden ges (se fig. 161). Bestäm höjden på pyramiden med hjälp av parallellförskjutningsmetoden.
167*. Bestäm avståndet mellan korsningslinjerna AB och CD (se fig. 159,a) som avståndet mellan parallella plan ritade genom dessa linjer.

Lösning. I fig. 163, och planen P och Q äro parallella med varandra, varav pl. Q dras genom CD parallellt med AB, och pl. P - genom AB parallellt med kvadrat. Q. Avståndet mellan sådana plan anses vara avståndet mellan att korsa räta linjer AB och CD. Du kan dock begränsa dig till att endast konstruera ett plan, till exempel Q, parallellt med AB, och sedan bestämma avståndet åtminstone från punkt A till detta plan.
I fig. 163, c visar planet Q ritat genom CD parallellt med AB; i projektioner utförda med "e" || a"b" och ce || ab. Använda metoden för att ändra pl. projektioner (Fig. 163, c), introducerar vi ytterligare en kvadrat. S, vinkelrät mot kvadraten. V och samtidigt
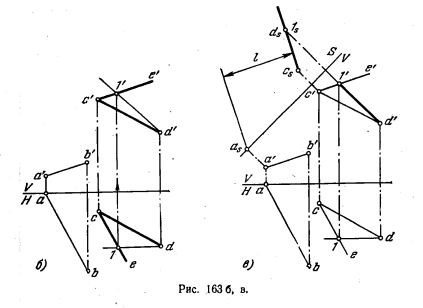
vinkelrätt mot kvadraten Q. För att rita S/V-axeln, ta frontal D-1 i detta plan. Nu ritar vi S/V vinkelrätt mot d"1" (Fig. 163, c). Pl. Q kommer att avbildas på torget. S som en rät linje med s d s. Resten framgår av ritningen.
168. SABC-pyramiden ges (se fig. 160). Bestäm avståndet mellan revbenen SC och AB Använd: 1) metod för att ändra området. projektioner, 2) metod för parallell rörelse.
169*. Bestäm avståndet mellan parallella plan, varav ett definieras av räta linjer AB och AC, och det andra av räta linjer DE och DF (Fig. 164, a). Utför också konstruktion för fallet när planen är specificerade av spår (Fig. 164, b).
Lösning. Avståndet (fig. 164, c) mellan parallella plan kan bestämmas genom att rita en vinkelrät från vilken punkt som helst i ett plan till ett annat plan. I fig. 164, g infördes ytterligare en kvadrat. S vinkelrätt mot kvadraten. H och till båda givna plan. S.H-axeln är vinkelrät mot horisontalen. horisontell projektion ritad i ett av planen. Vi konstruerar en projektion av detta plan och en punkt i ett annat plan på torget. 5. Avståndet från punkt d s till rät linje l s a s är lika med det erforderliga avståndet mellan parallella plan.
I fig. 164, d ges en annan konstruktion (enligt metoden för parallell rörelse). För att planet uttryckt av de skärande linjerna AB och AC ska vara vinkelrätt mot kvadraten. V, horisont. Vi sätter den horisontella projektionen av detta plan vinkelrätt mot x-axeln: 1 1 2 1 ⊥ x. Avstånd mellan framsidan projektion d" 1 av punkt D och rät linje a" 1 2" 1 (frontprojektion av planet) är lika med det erforderliga avståndet mellan planen.


I fig. 164, e visar införandet av ytterligare en kvadrat. S, vinkelrät mot området H och mot de givna planen P och Q (S/H-axeln är vinkelrät mot spåren P h och Q h). Vi bygger spår av P s och Q s. Avståndet mellan dem (se fig. 164, c) är lika med det önskade avståndet l mellan planen P och Q.
I fig. 164, g visar rörelsen av planen P 1 n Q 1, till positionen P 1 och Q 1 när horisonten. spåren visar sig vara vinkelräta mot x-axeln. Avstånd mellan nya fronter. spår P 1ϑ och Q 1ϑ är lika med det erforderliga avståndet l.
170. Givet parallellepipeden ABCDEFGH (Fig. 165). Bestäm avstånden: a) mellan parallellepipedens baser - l 1; b) mellan ytorna ABFE och DCGH - 12; c) mellan ytorna på ADHE och BCGF-l 3.
Du måste bestämma avståndet från en punkt till en linje. Allmän plan för att lösa problemet:
- genom given poäng rita ett plan vinkelrätt mot en given rät linje;
- hitta mötespunkten för linjen
med ett plan;
- Vi bestämmer avståndets naturvärde.
Genom en given punkt ritar vi ett plan vinkelrätt mot linjen AB. Vi definierar planet som de korsande horisontella och frontala linjerna, vars projektioner är konstruerade enligt vinkelräthetsalgoritmen (omvänt problem).
Hitta punkten där den räta linjen AB möter planet. Detta är ett typiskt problem om skärningen av en linje med ett plan (se avsnittet "Skärning av en linje med ett plan").

Planens vinkelräthet
Plan är inbördes vinkelräta om ett av dem innehåller en linje vinkelrät mot det andra planet. Därför, för att rita ett plan vinkelrätt mot ett annat plan, måste du först rita en vinkelrät mot planet och sedan rita det önskade planet genom det. I diagrammet definieras planet av två skärande linjer, varav en är vinkelrät mot planet ABC.
Om planen definieras av spår, är följande fall möjliga:
- om två vinkelräta plan utskjuter, så är deras kollektiva spår ömsesidigt vinkelräta;
- det allmänna planet och det utskjutande planet är vinkelräta, om det samlade spåret av det utskjutande planet är vinkelrät mot samma spår av det generiska planet;
- om spåren med samma namn av två plan i allmän position är vinkelräta, så är planen inte vinkelräta mot varandra.

Ersättningsmetod för projektionsplan
byte av projektionsplan |
||
är att planen är |
||
sektioner ersätts med andra plan- |
||
så att | geometrisk |
|
objekt i nytt system flygplan |
||
prognoser började uppta kvoten - av |
||
situation, vilket gör det möjligt att förenkla |
||
lösa problem. På en rumslig skala |
||
kete visar ersättandet av plan V med |
||
ny V1. Den projicerade visas också |
||
överföring av punkt A till de ursprungliga planen |
||
projektioner och ett nytt projektionsplan |
||
V 1. Vid byte av projektionsplan |
||
systemets ortogonalitet bevaras. |
||
Vi omvandlar den rumsliga layouten till en plan genom att rotera planen längs pilarna. Vi får tre projektionsplan kombinerade till ett plan.
Sedan tar vi bort projektionsplanen och |
|||
projektioner | |||
Från diagrammet för en punkt följer regeln: när |
|||
ersätta V med V 1 för att |
|||
frontal | |||
tion av den punkt som krävs från den nya axeln |
|||
avsätta applikationspunkten från |
|||
tidigare system av plan |
|||
åtgärder. På samma sätt kan man bevisa |
|||
att ersätta H med H 1 är nödvändigt |
|||
lägg åt sidan ordinatan för punkten. | |||

Det första typiska problemet med metoden för ersättning av projektionsplan
Den första typiska uppgiften för ersättningsmetoden för projektionsplan är att omvandla en generell rät linje först till en nivålinje och sedan till en utskjutande rät linje. Detta problem är ett av de viktigaste, eftersom det används för att lösa andra problem, till exempel när man bestämmer avståndet mellan parallella och skärande linjer, när man bestämmer en dihedral vinkel, etc.
Vi gör ersättningen V → V 1. | ||||
rita axeln parallellt med horisontalplanet |
||||
projektioner. | ||||
frontal projektion rak, för |
||||
vi skjuter upp |
||||
punktapplikatorer. Ny frontal |
||||
projektionen av den räta linjen är den räta HB-linjen. |
||||
Själva den raka linjen blir frontallinjen. |
||||
Vinkeln α° bestäms. | ||||
Vi gör ersättningen H → H 1. Vi ritar den nya axeln vinkelrätt mot frontprojektionen av den räta linjen. Vi konstruerar en ny horisontell projektion av linjen, för vilken vi plottar ordinaterna för linjen från det tidigare systemet av projektionsplan från den nya axeln. Den räta linjen blir en horisontellt utskjutande rät linje och "degenererar" till en punkt.
Avståndet från en punkt till en linje är längden på vinkelrät ritat från punkten till linjen. I beskrivande geometri bestäms den grafiskt med hjälp av algoritmen nedan.
Algoritm
- Den räta linjen flyttas till en position där den kommer att vara parallell med vilket projektionsplan som helst. För detta ändamål används metoder för att transformera ortogonala projektioner.
- Från en punkt dras en vinkelrät till en linje. Denna konstruktion bygger på satsen om projektion av en rät vinkel.
- Längden på en vinkelrät bestäms genom att transformera dess projektioner eller genom att använda den rätta triangelmetoden.
Följande figur visar en komplex ritning av punkt M och linje b, definierad av segment CD. Du måste hitta avståndet mellan dem.
Enligt vår algoritm är det första du ska göra att flytta den raka linjen till positionen parallellt med planet projektioner. Det är viktigt att förstå att efter att transformationerna har utförts bör det faktiska avståndet mellan punkten och linjen inte ändras. Det är därför det är bekvämt här att använda planbytesmetoden, som inte involverar att flytta figurer i rymden.
Resultaten av den första etappen av byggnationen visas nedan. Figuren visar hur ytterligare ett frontalplan P 4 införs parallellt med b. I det nya systemet (P 1, P 4) är punkterna C"" 1, D"" 1, M"" 1 på samma avstånd från X 1-axeln som C"", D"", M"" från axeln X.

Genom att utföra den andra delen av algoritmen, från M"" 1 sänker vi den vinkelräta M"" 1 N"" 1 till den räta linjen b"" 1, eftersom den räta vinkeln MND mellan b och MN projiceras på planet P 4 i full storlek. Med hjälp av kommunikationslinjen bestämmer vi positionen för punkt N" och utför projektionen M"N" för segmentet MN.

I slutskedet måste du bestämma storleken på segmentet MN från dess projektioner M"N" och M"" 1 N"" 1. För detta bygger vi rät triangel M"" 1 N"" 1 N 0, vars ben N"" 1 N 0 är lika med skillnaden (Y M 1 – Y N 1) av avståndet mellan punkterna M" och N" från X 1-axeln. Längden på hypotenusan M"" 1 N 0 i triangeln M"" 1 N"" 1 N 0 motsvarar det önskade avståndet från M till b.

Andra lösningen
- Parallellt med CD introducerar vi ett nytt frontalplan P 4. Den skär P 1 längs X 1-axeln och X 1 ∥C"D". I enlighet med metoden för att ersätta plan bestämmer vi projektionerna för punkterna C"" 1, D"" 1 och M"" 1, som visas i figuren.
- Vinkelrätt mot C"" 1 D"" 1 bygger vi ytterligare ett horisontellt plan P 5, på vilket den räta linjen b projiceras till punkten C" 2 = b" 2.
- Avståndet mellan punkt M och linje b bestäms av längden på segmentet M" 2 C" 2, indikerat i rött.

Liknande uppgifter: